- Professor
- Suwon Lee
- LocationRm. 542, College of Engineering Bldg
- Contact02-910-6695
- Emailsuwon.lee@kookmin.ac.kr
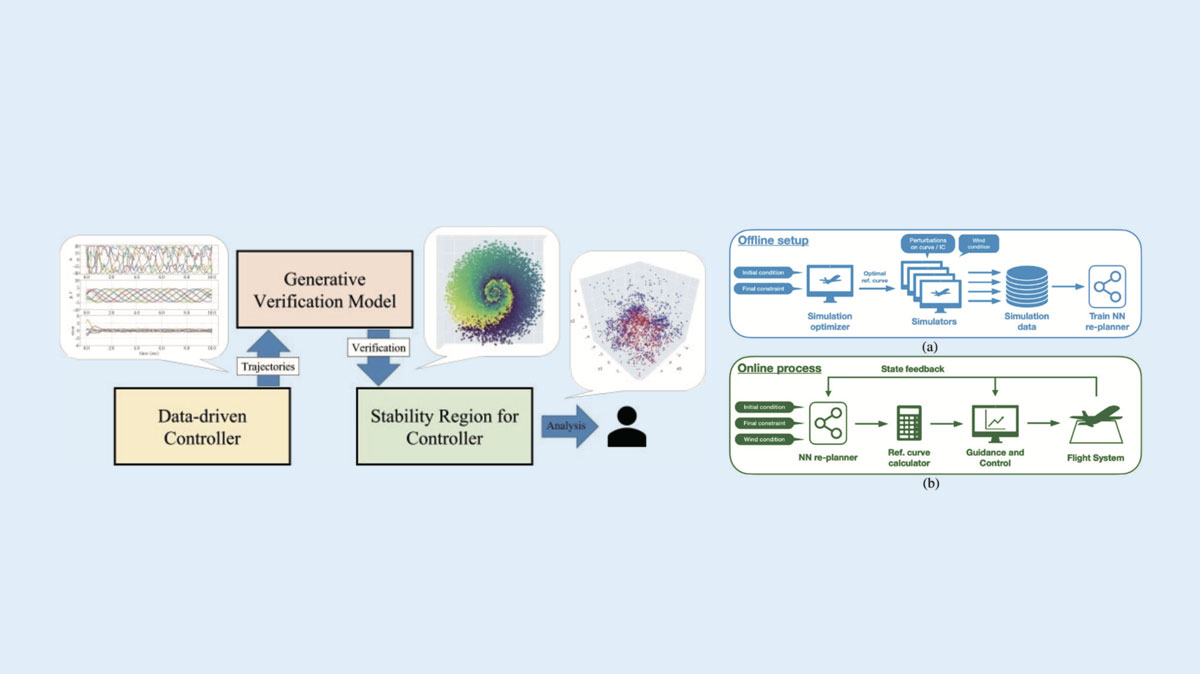
In FMCL, we design guidance and control systems for future mobility platforms including UAM, aircrafts, and drones. One of our research topics is to use deep learning to design and verify control systems for nonlinear control systems. We aim to develop a novel framework that can combine the advantages of deep learning and nonlinear control theory to achieve high-performance and reliable control of future mobility systems. We also work on path planning and G&C algorithms for future mobility platforms that can optimize the flight efficiency and safety.
Major Research Fields
- Path Planning, Guidance and Control Algorithms
- DNN-based Controllers
- Urban Air Mobility Systems
Research Activities
- Research on Control System Design and Verification Methodology using Deep Learning for Nonlinear Control Systems, NRF, Sep. 2022 – Feb. 2025.
- Path Planning, Guidance, and Control Algorithms for Future Mobility, KMU, Feb, 2022 – Feb. 2024.
- A Study on improvement of Launch Acceptability Region for Air-launched Guided Munition, LIG Nex1, Jan. 2020 – Feb. 2021.
- Development of Wireless Communication Tracking based Location Information System in Disaster Scene for Fire-fighters and Person Who Requested Rescue, DBCom Corp., Jan. 2020 – Feb. 2021.
- A Study on Control System Using Strapdown Seeker with Multi-Division Field-of-View, Feb. 2019 – Dec. 2019.
- A Study on Trajectory Generation and Improved Guidance/Control System for Precision Guided Munition, Mar. 2017 – Dec. 2019