- Professor
- Woo Seung Hoon
- LocationRm. 303, Innovation & Partnership Bldg
- Contact02-910-6403
- Emailboltra@kookmin.ac.kr
In the Integrated Vehicle Dynamics & Control Lab., we design integrated chassis control system for vehicle performance or safety. In particular, we are conducting vehicle dynamics-based research as following area, chassis control system; back-up cooperative control; autonomous driving system; verification and validation for vehicle performance or safety.
Major Research Fields
- Development of Individual and Integrated Chassis Control Technology
- Fault-tolerant Vehicle Chassis Cooperative Control Technology
- Digital Twin-based Vehicle Performance Verification Technology
- Vehicle Dynamics-based Autonomous Driving Control Technology
Research Activities
- Development of The Core System Technology for Hyper-safe Driving Platform (2021 ~ Present)
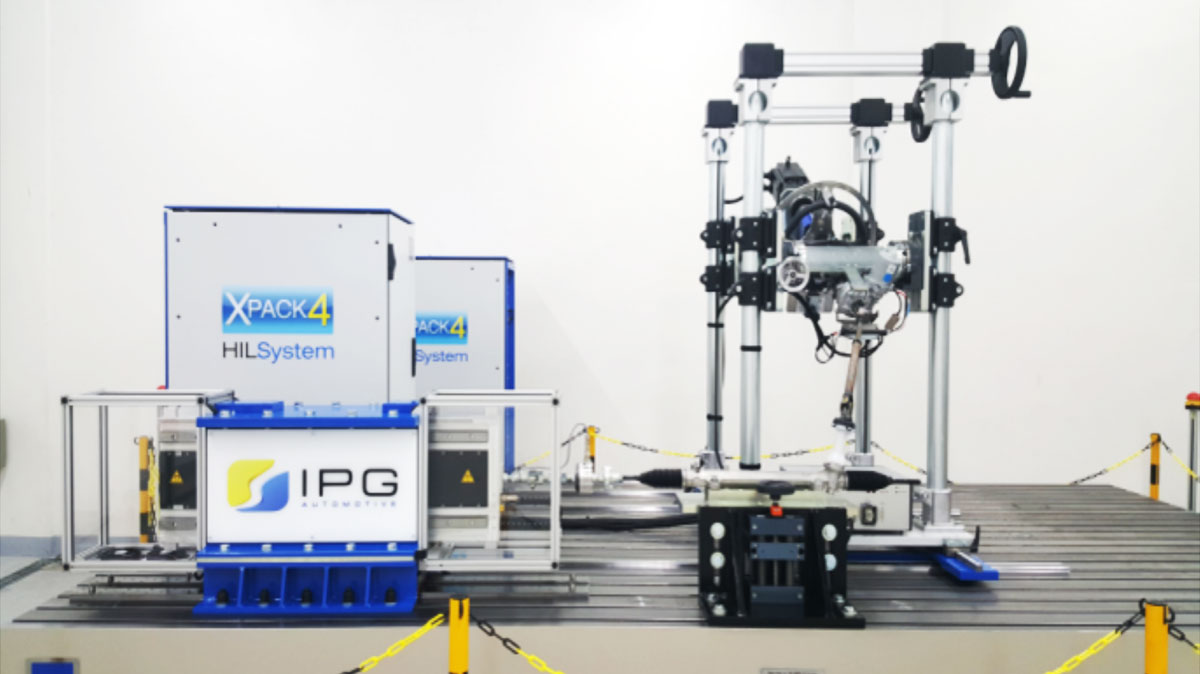
- Functional Safety Fault Tolerant Time Interval and Safety Mechanism Validation for The Reliability of SBW System (2022 ~ Present)
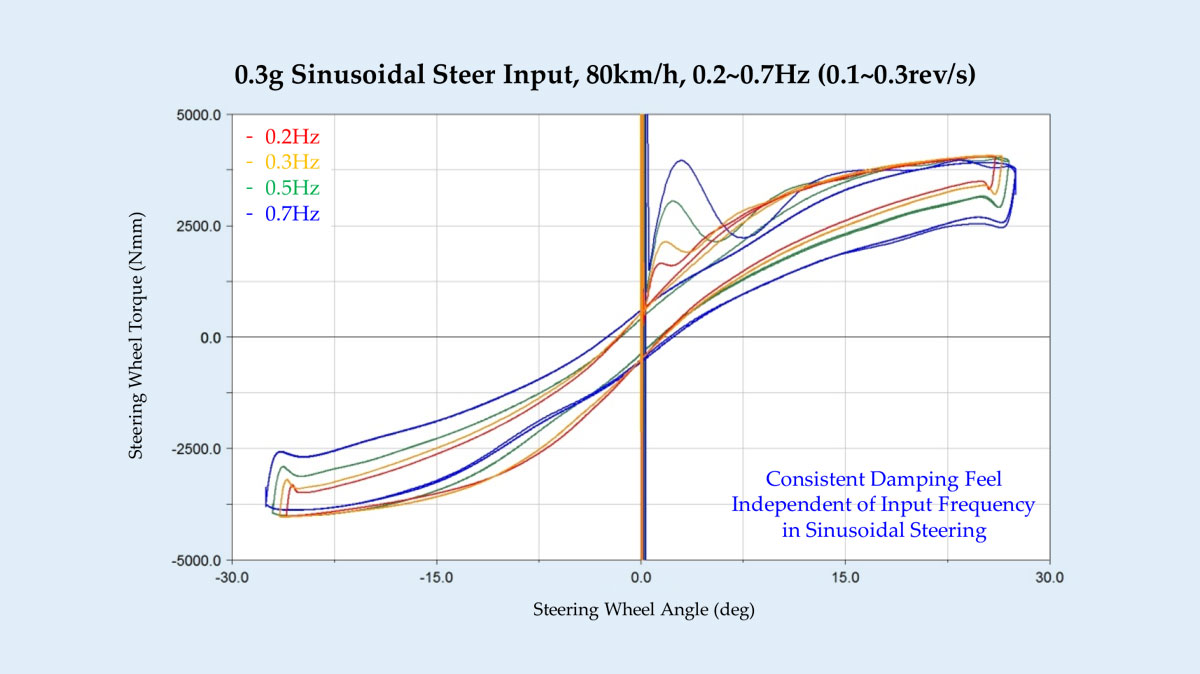
- Control Logic Enhancement Study for Improving Disturbance Rejection and Steering Performance of EPS Torque Feedback Controllers (2022 ~ Present)
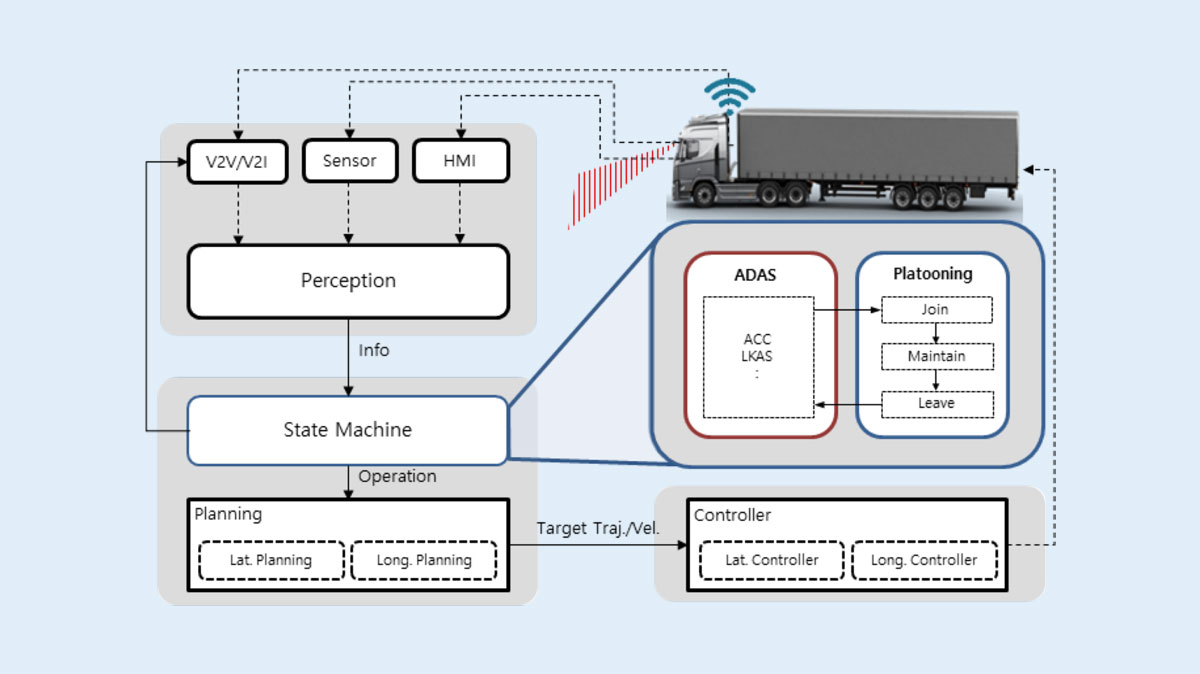
- Technology Development of SW Integrated Terminal Platform for Cargo Transportation Driving Management Based on V2X Hub Technology for Autonomous Vehicles. (2022 ~ Present)
- StBW (Steer-by-Wire) Emergency Steering Logic Design and Evaluation (2023 ~ Present)