- Professor
- Yoo Jin Woo
- LocationRm. 543, College of Engineering Bldg
- Contact02-910-4836
- Emailjwyoo@kookmin.ac.kr
Intelligent Vehicle Signal Processing (IVSP) Lab. researches various subjects for the development and verification of autonomous driving System. In perception field, camera/lidar-based signal processing technologies for object detection/tracking/prediction are conducted. For ego-vehicle localization, we study on SLAM*(Visual, Lidar) technology and the utilization method for HD-Map*. In planning and decision-making area, various researches about local/global path generation and following technologies are studied. Moreover, many verification researches on safety scenarios to demonstrate the autonomous driving system through International Organization for Standardization (ISO 26262, SOTIF etc.). All the studies and developments are based on the real-vehicle or 3D-simulation test for a practical purpose.
Major Research Fields
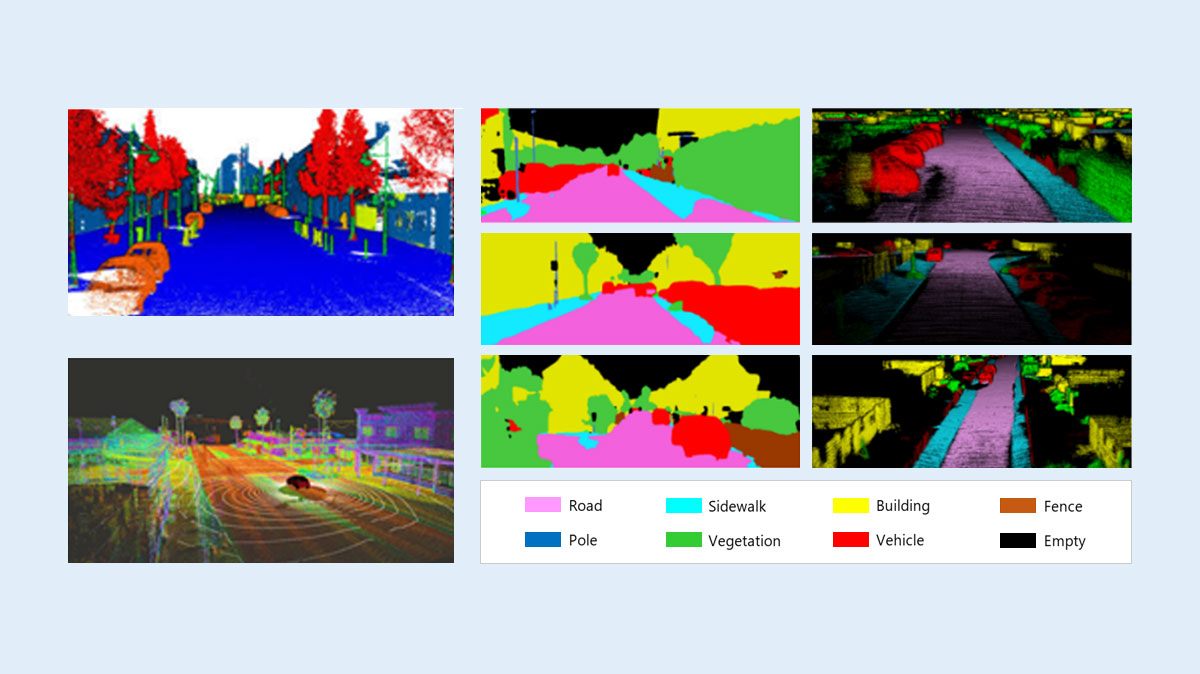
- Deep Learning based Camera Image & LiDAR Point Cloud Perception
- Object Detection/Tracking/Prediction
- Path Generation and Following
- Decision Making for Autonomous Driving
- Reinforcement Learning and Imitation Learning
- Visual & LiDAR SLAM / High-Definition(HD) Map
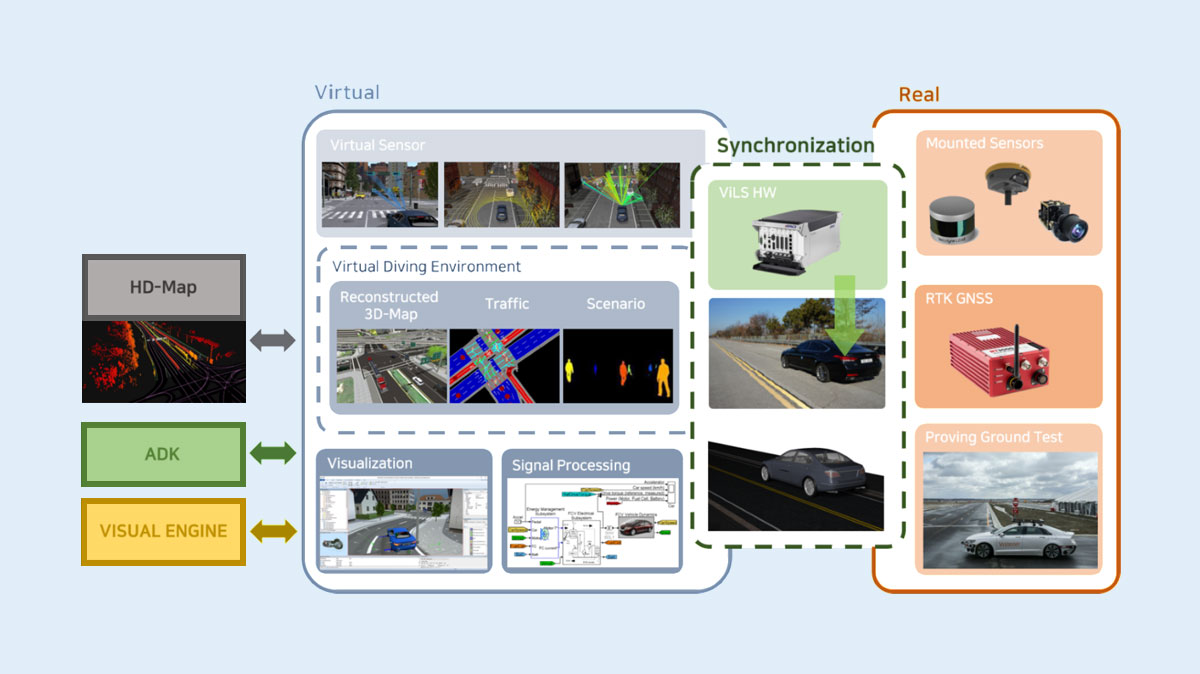
- MILS / SILS / HILS / VILS / Vehicle Test
Research Activities
- Color-Modulated Extra-Sensory Perception Technology Research Center, Funded by National Research Foundation of Korea. (2021.06~2028.02)
- Development of Mixed Reality-based Autonomous Driving parts and System Evaluation technology, Funded by Ministry of Trade, Industry and Energy. (2021.04~2017.12)
- Development of Real Vehicle Simulation-based System Safety Evaluation technology, Funded by Ministry of Land,Infrastructure and Transport. (2021.04~2017.12)
- Establishment of Evaluation Criteria for Camera/LiDAR sensor-cleaning logic based on pollution-level, Funded by Hyundai NGV. (2022.04 - 2023.03)